约束满足问题(CSP)
CSP定义
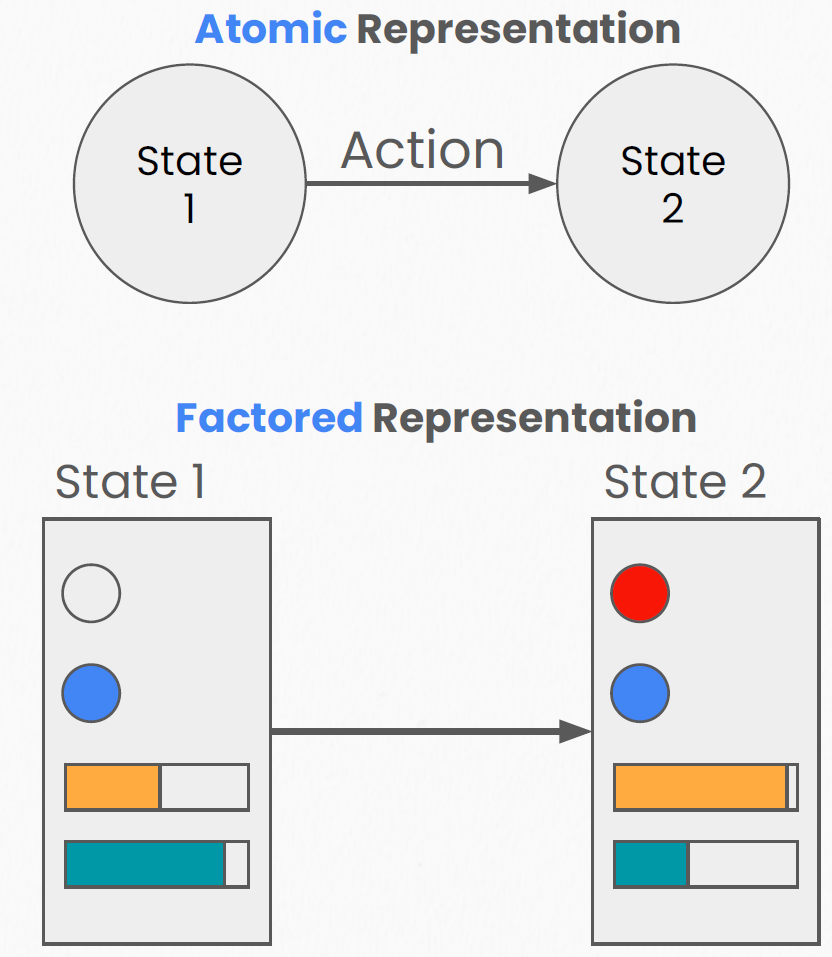
如下图所示,在传统搜索中我们不关注state内部的情况,这种被称为原子表示。而在CSP方法中,我们使用因子表示,即将状态本身拆解为一组变量和值。
CSP的定义包括:
- 变量 (Variables, \(X\)): 需要被赋值的对象集合 (\(X_1, ..., X_n\))。
- 例子:地图着色中的每一个区域。
- 域 (Domains, \(D\)): 每个变量可以取的值的集合 (\(D_i\))。
- 例子:{红, 绿, 蓝}。
- 约束 (Constraints, \(C\)): 限制变量取值的规则 (\(C_m\))。
- 例子:相邻的区域不能涂相同的颜色 (\(X_1 \neq X_2\))。
- 目标 (Goal): 找到一个 赋值 (Assignment) ,满足:
- 完整性 (Complete): 所有变量都被赋值。
- 一致性 (Consistent): 不违反任何约束。
回溯搜索
回溯搜索(Backtracking Search) 是CSP的标准解法。回溯搜索本质上是针对 CSP 优化的 深度优先搜索 (DFS) 。
工作流程:
- 每次只选择一个变量进行赋值(而不是生成整个新状态)。
- 检查这个赋值是否符合当前的约束。
- 如果符合: 继续递归给下一个变量赋值。
- 如果不符合: 放弃当前分支,回溯 (Backtrack) 到上一步,尝试域中的下一个值。
核心思想: "Fail fast"(一旦发现走不通立刻回头,而不是走到终点才发现错了)。
约束传播
约束传播 (Constraint Propagation)是用于加速回溯搜索的技术。
其内容顾名思义,我们可以利用约束条件,提早推导出哪些值是不可能的,从而缩小变量的域(Domain)。
常见方法包括:
- 前向检查 (Forward Checking): 当给变量 \(X\) 赋值后,立即检查所有与 \(X\) 相连的未赋值变量,把它们域中与 \(X\) 冲突的值删掉。如果某个变量的域变为空,则立即回溯。
- 弧一致性 (Arc Consistency / AC-3): 比前向检查更强。它在赋值前或赋值中,通过连锁反应传播约束,确保每条边(Arc)上的约束都是满足的,能更早地检测出无解的情况。
变量排序启发式
回溯搜索的效率在很大程度上取决于变量选择顺序——先给哪个变量赋值,可能导致搜索空间产生巨大差异。
最少剩余值(MRV)
最少剩余值(Minimum Remaining Values, MRV) 启发式,也称为"最受约束变量"或"失败优先"启发式,其策略是:
优先选择域中剩余合法值最少的变量。
直觉很简单:如果一个变量只剩 1 个合法值,那它必须取那个值;如果一个变量只剩 2 个合法值而另一个还剩 10 个,先处理前者能更快地发现矛盾。
形式化地,在回溯搜索的每一步中,我们选择:
其中 \(D_i\) 是变量 \(X_i\) 当前的有效域(经过约束传播后的剩余值集合)。
MRV 的有效性
MRV 之所以被称为"失败优先",是因为它优先处理最容易失败的变量。这看似违反直觉,但实际上可以尽早触发回溯,避免在注定失败的分支上浪费大量时间。实验表明,MRV 在大多数 CSP 问题上都能显著减少搜索节点数。
度启发式
度启发式(Degree Heuristic) 用于在 MRV 产生平局时打破平衡。其策略是:
优先选择与最多未赋值变量存在约束关系的变量。
形式化地,变量 \(X_i\) 的"度"定义为它与其他未赋值变量之间的约束条数。度启发式选择度最大的变量:
直觉是:度最大的变量对其他变量的约束最多,先处理它可以最大程度地缩小后续变量的域。
在地图着色问题中,度启发式会优先选择与最多相邻(且尚未着色)区域相连的区域。
值排序
变量排序决定了"先给谁赋值",而值排序(Value Ordering)决定了"先尝试哪个值"。
最少约束值(LCV)
最少约束值(Least Constraining Value, LCV) 启发式的策略是:
优先尝试对其他未赋值变量施加约束最少的值。
具体来说,对于当前选定的变量 \(X_i\),我们对其域 \(D_i\) 中的每个值 \(v\) 计算:如果给 \(X_i\) 赋值 \(v\),会使得多少个邻居变量的域缩小。选择使邻居域缩小最少的那个值。
其中 \(\text{eliminated}(X_j, v)\) 表示因 \(X_i = v\) 而从 \(X_j\) 的域中移除的值的数量。
变量排序 vs 值排序的哲学差异
注意 MRV 和 LCV 的策略方向是相反的:
- MRV(变量排序):失败优先 —— 先处理最难的变量,尽早发现死路。
- LCV(值排序):成功优先 —— 先尝试最有希望成功的值,尽量避免死路。
两者结合时效果最好:先选择最受约束的变量(MRV),再从最不约束他人的值开始尝试(LCV)。
局部搜索求解 CSP
除了回溯搜索外,我们还可以用局部搜索(Local Search)方法来求解 CSP。局部搜索从一个完整但可能不一致的赋值出发,通过反复修改变量的值来减少冲突。
最小冲突算法
最小冲突算法(Min-Conflicts) 是最经典的 CSP 局部搜索方法:
function MIN-CONFLICTS(csp, max_steps):
current ← 对所有变量随机赋一个初始值
for i = 1 to max_steps:
if current 满足所有约束:
return current
var ← 随机选择一个存在冲突的变量
value ← 选择使 var 冲突数最少的值
将 var 的值设为 value
return failure
算法的核心步骤:
- 随机初始化:给所有变量随机赋值(不管是否满足约束)。
- 选择冲突变量:随机选取一个当前赋值违反了某条约束的变量。
- 最小化冲突:将该变量的值改为使冲突总数最小的值(如果存在平局则随机选一个)。
- 重复直到找到解或达到最大迭代次数。
最小冲突的效率
最小冲突算法的一个惊人特点是,对于许多 CSP 问题(包括 \(n\) 皇后问题),它几乎可以在常数时间内找到解,与问题规模无关。例如,100 万皇后问题平均只需约 50 步即可求解。这是因为大多数随机初始赋值已经接近一个解,只需少量局部调整即可收敛。
局部搜索的局限性
局部搜索的主要问题是容易陷入局部最优(Local Minimum)——即所有单变量修改都无法减少冲突数,但当前赋值并非全局最优解。常见的应对策略包括:
- 随机重启(Random Restart):陷入局部最优时,重新随机初始化。
- 随机游走(Random Walk):以一定概率随机选择值(而非最小冲突值),帮助跳出局部最优。
- 模拟退火(Simulated Annealing):以递减的概率接受更差的解。
- 禁忌搜索(Tabu Search):维护一个"禁忌列表",避免重复访问最近的赋值。
CSP 作为优化问题
到目前为止,我们讨论的 CSP 都是硬约束:约束要么满足,要么不满足。但在现实世界中,很多问题需要处理软约束(Soft Constraints)和偏好(Preferences)。
软约束与加权 CSP
加权 CSP(Weighted CSP)或约束优化问题(Constraint Optimization Problem, COP)对每条约束赋予一个权重或代价:
- 硬约束:必须满足,违反即无效(权重 = \(\infty\))。
- 软约束:违反会产生一定代价,但不会导致解无效。
目标从"找到满足所有约束的赋值"变为"找到使总代价最小化的赋值":
其中 \(w_m\) 是约束 \(C_m\) 的权重,\(\mathbb{1}[\text{violated}(C_m)]\) 在约束被违反时为 1。
在更一般的形式中,每条软约束可以定义一个代价函数 \(f_m\),赋值的总代价为:
常见的优化方法
加权 CSP 可以用以下方法求解:
- 分支定界(Branch and Bound):在回溯搜索中维护当前最优解的代价上界,剪掉代价已超过上界的分支。
- 局部搜索:使用最小冲突的加权版本,每次选择使加权冲突代价最小的值。
- 整数线性规划(ILP):将 CSP 转化为数学规划问题,用成熟的求解器处理。
现实世界中的 CSP 应用
CSP 框架具有强大的通用性,可以建模大量实际问题。
课程调度
大学课程调度是一个典型的 CSP 问题:
- 变量:每门课程的时间段和教室。
- 域:所有可用的时间段和教室。
- 约束: * 同一教授不能在同一时间上两门课(硬约束)。 * 同一教室不能同时安排两门课(硬约束)。 * 教室容量必须满足选课人数(硬约束)。 * 尽量避免同一学生的课程时间冲突(软约束/偏好)。 * 教授偏好的时间段(软约束/偏好)。
数独
数独是一个非常经典的 CSP 实例:
- 变量:\(9 \times 9\) 网格中每个空格 \(X_{ij}\)。
- 域:\(D_{ij} = \{1, 2, ..., 9\}\)。
- 约束: * 每一行中所有数字不重复(All-Different 约束)。 * 每一列中所有数字不重复。 * 每个 \(3 \times 3\) 宫中所有数字不重复。
数独非常适合用 弧一致性 + 回溯搜索 + MRV 来求解。事实上,对于大多数数独谜题,单独使用弧一致性(AC-3)就能解出大部分格子,只需少量回溯即可完成。
其他应用
CSP 框架还广泛应用于:
- 地图着色:给地图的区域着色,使相邻区域颜色不同(经典的图着色问题)。
- 资源分配:将有限的资源分配给多个任务,满足各种约束。
- 电路设计:电子元件的布局和布线。
- 自然语言处理:词性标注、句法分析中的约束传播。
- 计算机视觉:场景标注、图像分割中的标签一致性约束。