刘杰夫
计算机科学 & AI / 创造者 / 研究者
关于我
计算机科学硕士(塔夫茨大学),同时拥有经济学背景。专注于 AI、机器人和构建连接技术与现实需求的实用工具。这个页面用来收集我的轻量级个人项目和研究演示——大多是我在 GitHub 和 Hugging Face 上折腾的小东西。
精选项目

ANIMA 框架 & 智能机械臂
一个具身智能项目,将 ANIMA 认知框架与自研智能机械臂结合。ANIMA 探索面向物理操作的智能体推理与动作循环,智能机械臂则作为硬件平台——融合感知、规划与控制,完成真实世界中的具身任务。
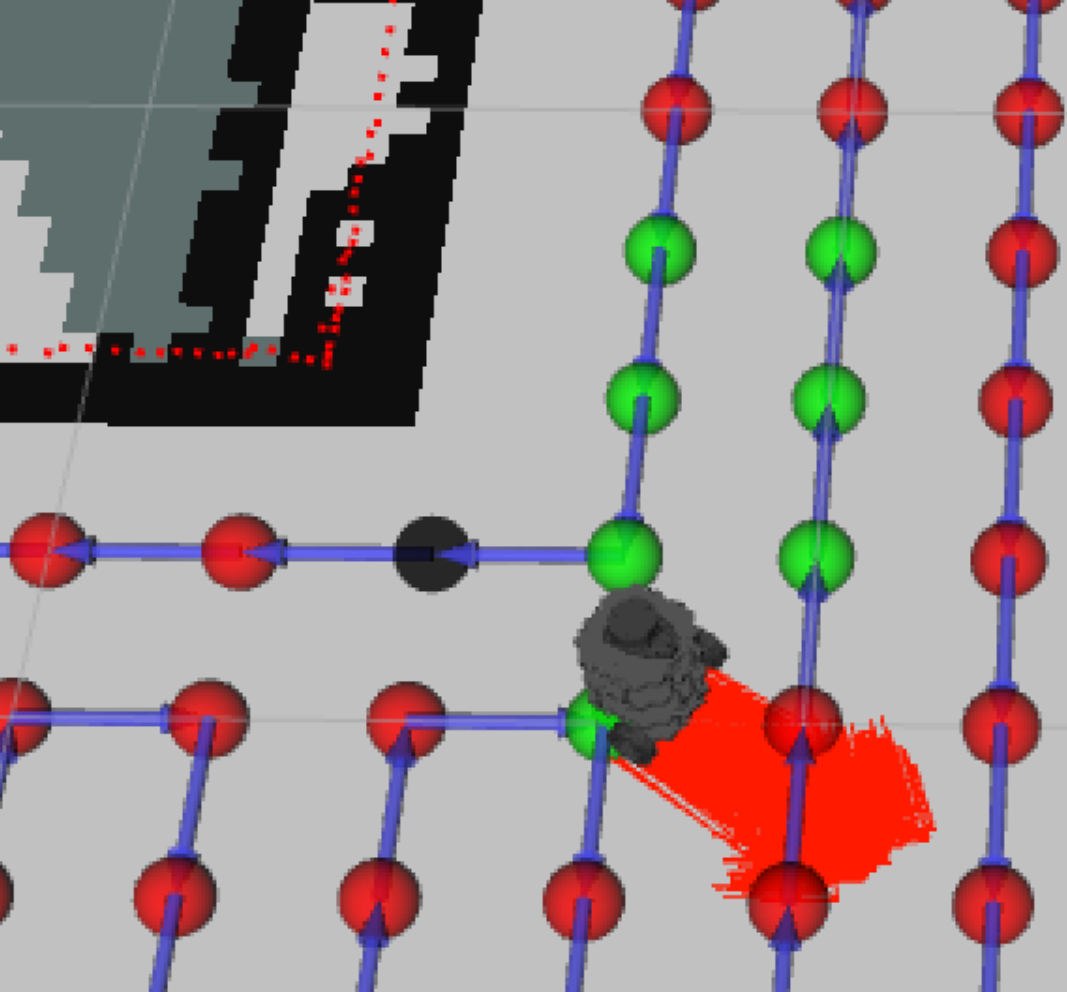
智能清扫机器人 (Noetic 版本)
基于 ROS 的自主清扫机器人,构建在 TurtleBot3 之上,集成 SLAM 建图、前沿探索和全覆盖清扫。自研清扫模块包含基于膨胀算法的路径规划器和贪心路径执行器,并配有自定义 GUI 控制面板和基于 Vosk 模型的实时语音控制。在 ROS Noetic + Ubuntu 20.04 上开发与测试。

智能手套:手势驱动的机器人控制
基于 Raspberry Pi Pico 的智能手套,使用 MPU9250 IMU 和 FSR402 力传感器捕捉手部动作和手指按压。识别出的手势可驱动下游机器人——包括实时控制机械臂——并正在拓展到手语识别和 IoT 平台集成。运行于 Raspberry Pi 4B + Ubuntu 22.04 + ROS Humble。
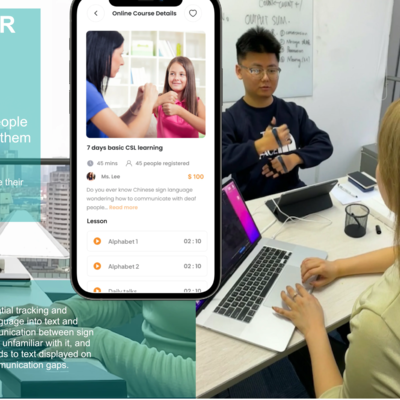
智能翻译手套 · Figma 产品原型
智能翻译手套概念的 Figma 产品设计作品集 —— 六页高分辨率原型,涵盖产品定位、使用场景与交互流程。部署在 GitHub Pages 上,使用 PhotoSwipe 实现交互式 lightbox 画廊,支持滚轮缩放、拖拽平移与键盘导航。与 Qian Li 合作完成可用性测试(Usability Test)。
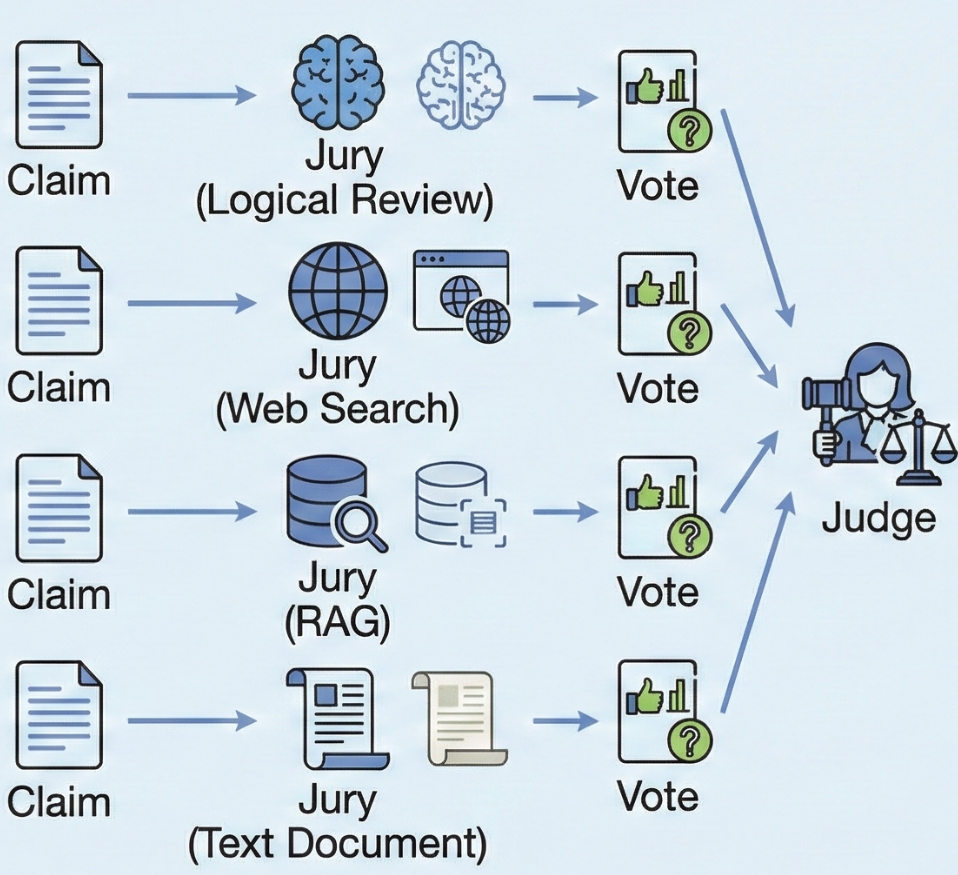
VisInject:将语言指令嵌入图像以劫持 MLLM
多模态大模型可能被隐藏在图像中的指令劫持。VisInject 研究针对开源 MLLM 的视觉提示注入攻击原理及防御策略。
颜色校准:光照自适应颜色识别
光照自适应的色彩校准流水线,通过校色卡从照片中预测真实颜色。Hugging Face 上提供完整全栈:在线 Space、训练好的 YOLOv8 模型与数据集。

A.L.I.C.E. × 生成式智能体
2D 版西部世界——五位 AI 村民在模拟中世纪世界中生活、谋划、做梦。他们规划每一天,反思过去,每晚在梦境中整合记忆。基于 Stanford 生成式智能体架构。
教育背景

计算机科学硕士
塔夫茨大学 (Tufts University)专注于人工智能、深度学习、强化学习和机器人方向。
公开课学习
加州大学伯克利分校 (UC Berkeley)通过公开课程在计算机科学和 AI 领域受益良多。
联系方式
- jeffliulab.com — Lab Website
- 美国马萨诸塞州波士顿地区
- jeff@jeffliulab.com
- github.com/jeffliulab
- huggingface.co/jeffliulab